May 03, 2023
Nanopi neo core 作为下位机首次配置流程
准备工作
硬件准备
- NanoPi NEO Core 板子
- 4G 及以上的 TF 卡和读卡器
- USB 转串口
- 水下机器人主板(提供网口和供电)
软件准备
- 安装 SSH 软件(较新的 Windows 系统一般自带,也可以去下载专门的 SSH 软件,如:
putty、finalshell、MobXterm等等) - 串口终端(如
putty、MobXterm等等) - 前往 官方 WiKi 下载系统镜像,注意要下载 带 eflasher 的 Ubuntu xenial 4.14 ,即文件名类似于
h3_ eflasher friendlycore-xenial_ 4.14_ armhf 20210618.img.zip的镜像文件
开始烧录固件
(全新的 Nano Pi 会内置该固件,可以直接跳到系统配置)
向 SD 卡写入镜像
使用镜像写入工具(如 win32diskimager),选择指定镜像烧录(烧录前请确保 SD 卡只有一个分区)
使用串口连接 Nano Pi
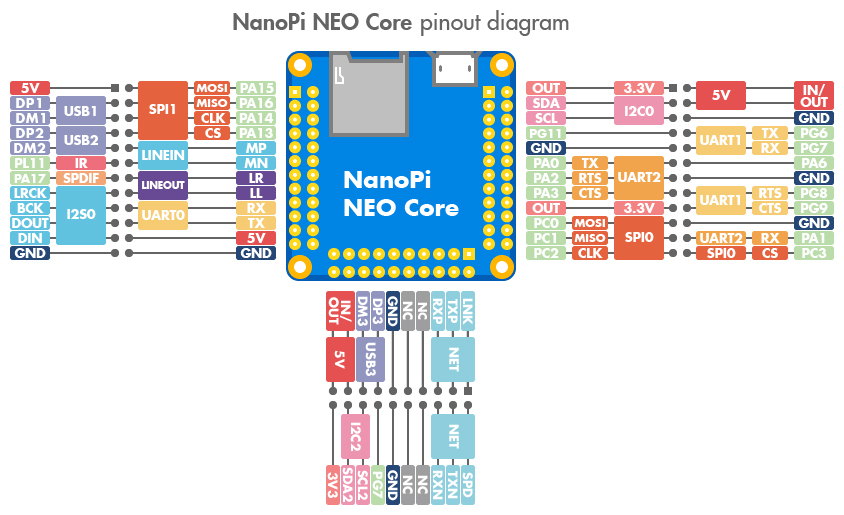
请将 USB 转串口连接到 Nano Pi 的 RX0 和 TX0 引脚,并且共地,引脚图如下:
电脑连接SBC
将烧录好的 SD 卡插入 Nano Pi
使用 Nano Pi 上的 USB 给板子供电
将 USB 转串口连接到电脑的串口终端
输入账户密码进行登陆(用户账号和密码都是
pi,root 用户密码是fa),进入系统后在终端输入su root切换 root 用户,后执行eflasher命令进入如下界面: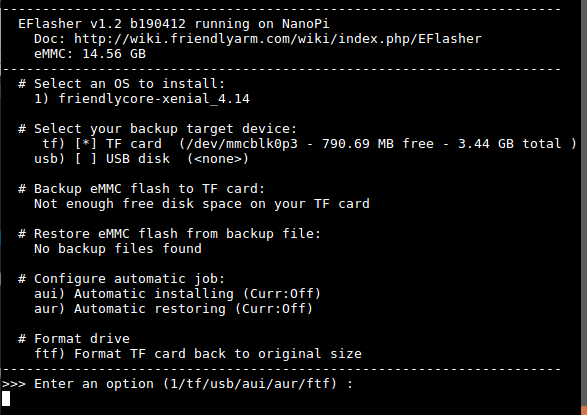
输入“1”后按回车,选择烧写 friendlycore 系统到 eMMC 上后,会提示如下信息:
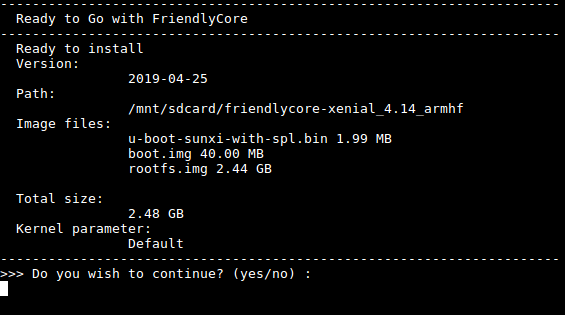
输入“yes”,确定进行烧写:
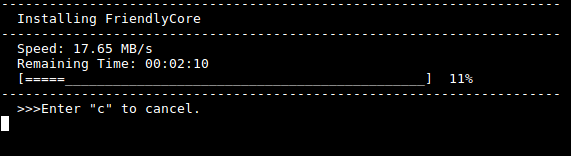
等待烧写完毕后,断电并从卡槽中取出 TF 卡。
系统配置
硬件连接
将 Nano Pi 插入调试主板后,给其供电并连接网口至路由器
电脑端操作
到路由器后台查看 Nano Pi 的 IP 地址,使用 SSH 工具连接至 Nano Pi (用户账号和密码都是
pi,root 用户密码是fa)更换国内软件源,终端输入
sudo nano /etc/apt/sources.list后修改为如下内容:1
2deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial main restricted universe multiverse
deb http://mirrors.tuna.tsinghua.edu.cn/ubuntu-ports/ xenial-updates main restricted universe multiverse更新软件源(依次输入以下命令):
1
2
3
4
5
6
7sudo apt-get clean
sudo apt-get update
sudo apt-get upgrade
#可能需要较长时间,期间不能关闭 SSH 连接安装必备软件(依次输入以下命令):
1
2
3
4
5
6
7sudo apt-get install gdb htop cmake unzip i2c-tools autoconf automake libtool
sudo apt-get install libgstreamer*
sudo apt-get install libgstreamer1.0-0 gstreamer1.0-plugins-base gstreamer1.0-plugins-good gstreamer1.0-plugins-bad gstreamer1.0-plugins-ugly gstreamer1.0-libav gstreamer1.0-doc gstreamer1.0-tools gstreamer1.0-x gstreamer1.0-alsa gstreamer1.0-pulseaudio
#可能有些软件包找不到了,请在命令中删除那些软件包的名字再尝试安装到 Github 下载 rovmaster 的源码 zip 压缩包,使用网络传输到 Nano Pi ,在 SSH 终端中使用
unzip命令进行解压解压后进入 rov-master-main 文件夹,输入
sudo chmod +x build.sh后输入sudo ./build.sh进行依赖编译显示 构建完成 后,输入命令
make后没有错误后,再输入一次make就会产生可执行文件rovmaster使能
spi1外设,输入udo npi-config命令后到\> Advanced Options中使能相关 SPI 设备修改静态 IP ,输入命令
sudo nano /etc/network/interfaces后将原文件内容注释掉后加上:1
2
3
4
5
6allow-hotplug eth0
iface eth0 inet static
address 192.168.137.219
netmask 255.255.255.0
gateway 192.168.137.1
dns-nameservers 192.168.137.1配置结束